
Controlador do Registrador de Deslocamentos
O controlador desenvolvido anteriormente apresentava nas saídas do decodificador formas-de-onda dos sinais de controle semelhantes às encontradas nos registradores de deslocamento.É claro que se pode aproveitar essa semelhança para projetar o controlador da máquina de somar a partir de registradores de deslocamento.
Então, o controlador é constituído de um contador em anel de registrador de deslocamentos de seis estados, um flip-flop para cada estado, com o primeiro flip-flop ajustado e os outros reajustados.Em cada ciclo do relógio a condição SET (Q=1) se deslocará ao longo do registrador, e em cada ciclo do relógio, fica disponível na saída dos flip-flops as formas-de-onda dos sinais de controle.
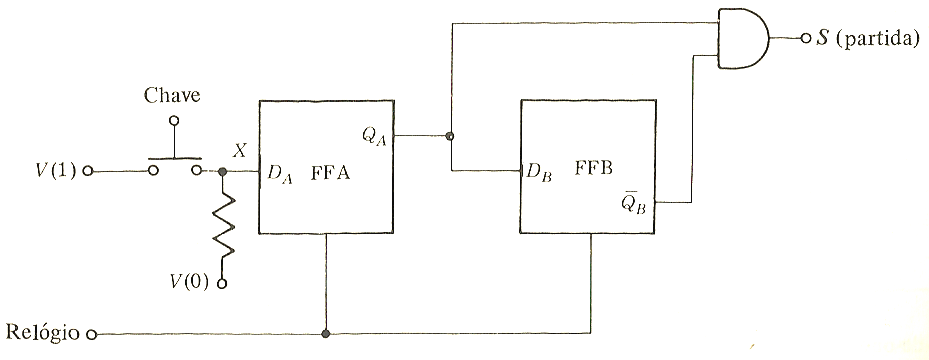
Um problema adicional no controlador de registrador de deslocamentos é garantir que o primeiro flip-flop estará ajustado na partida e que, após o primeiro ciclo de relógio, seja reajustado.O circuito da Fig.1 mostra o circuito de partida que atende esses requisitos.
|
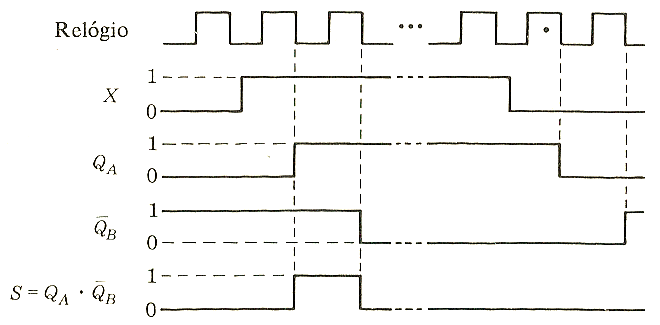
As formas-de-onda do circuito de partida(Fig.2) mostram que o fechamento da chave (X=1) produz um nível lógico 1 na partida S em apenas um ciclo de relógio, independente do tempo no qual a chave fica fechada (X=1).
 |
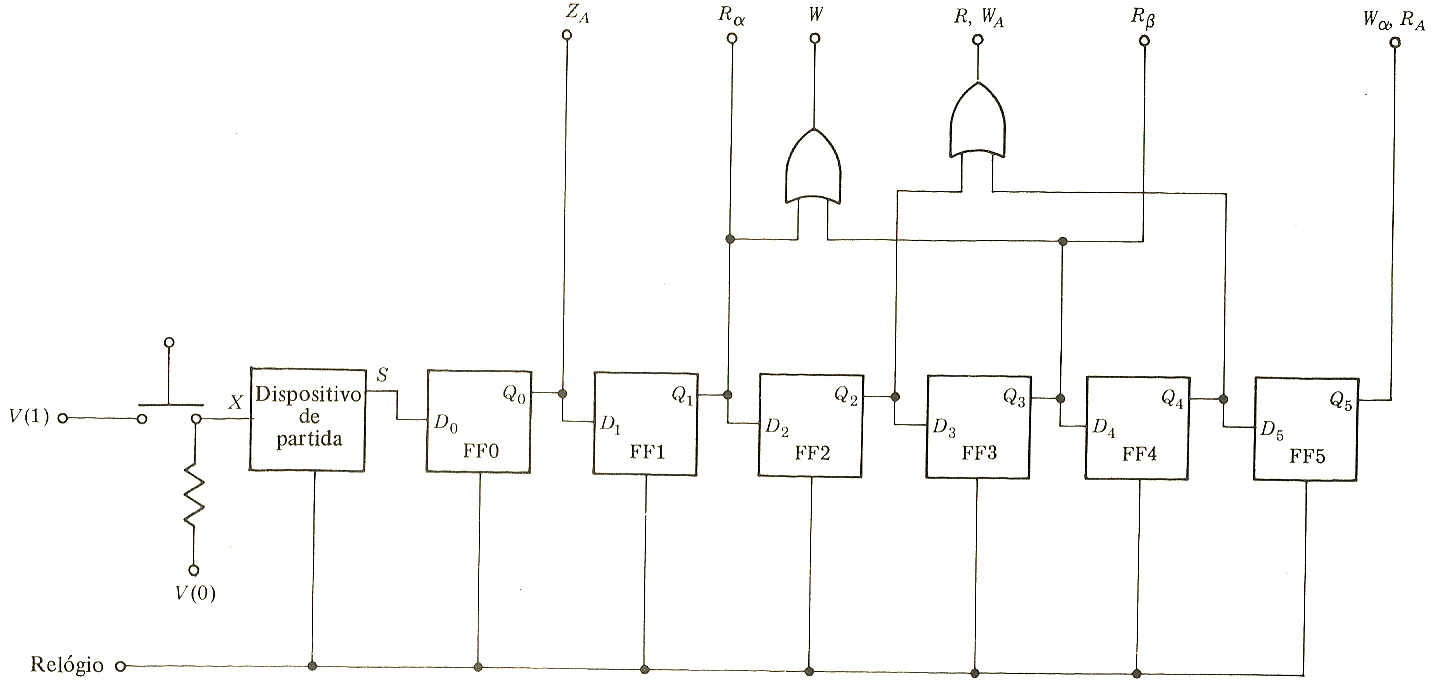
O circuito completo do controlador de registrador de deslocamentos está mostrado na figura abaixo.Este circuito emprega uma quantidade maior de flip-flops e apresenta uma lógica mais simples que permite associar cada flip-flop a um estado.
|
Chave Aberta: X=0 e S=0
Após alguns ciclos de relógio: Q0=Q1=Q2=Q3=Q4=Q5=0 e ZA=Ra=W=R=WA=Rb=Wa=RA=0
Chave Fechada: X=1 e S=1
Depois de um período de relógio S=1 será propagado
Vantagens: projeto mais simples;
correspondência entre um flip-flop e o estado
Desvantagens: maior número de flip-flops;
mais estados não utilizados
Resposta Condicional de Controladores
Entradas de Realimentação são os resultados internos utilizados como entradas.
Entradas Condicionais ou Modificadores são as entradas externas ao sistema.
No controlador acima pode-se introduzir uma entrada externa para decidir em qual registrador o resultado será armazenado, de acordo com o valor lógico dessa entrada.
|
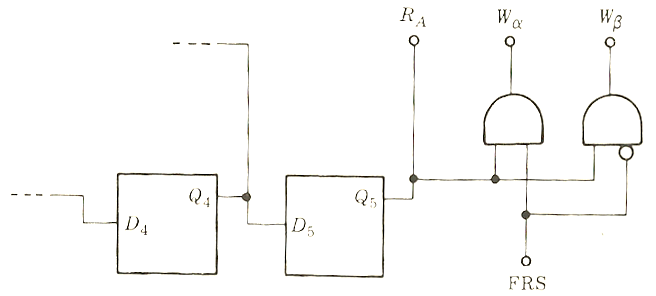
A entrada FSR(Seletor de Registro Final) externa determina o registrador de armazenamento final do resultado.
FSR=1 : Wa=1 no último pulso de relógio então o resultado armazenado em Ra
FSR=0 : Wb=1 no último pulso de relógio então resultado armazenado em Rb
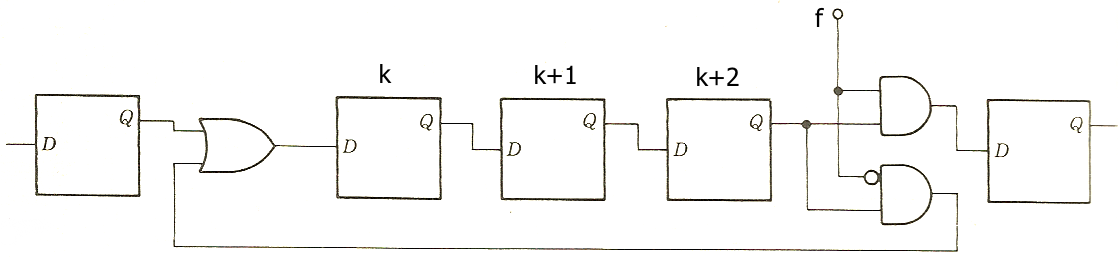
Um controlador do registrador de deslocamento pode usar uma entrada f de realimentação obtida durante um intervalo de relógio para controlar a microoperação que será realizada durante o próximo intervalo de relógio.A figura abaixo mostra a entrada de realimentação f no controlador que seleciona a microoperação no (k+1)-ésimo pulso de relógio.
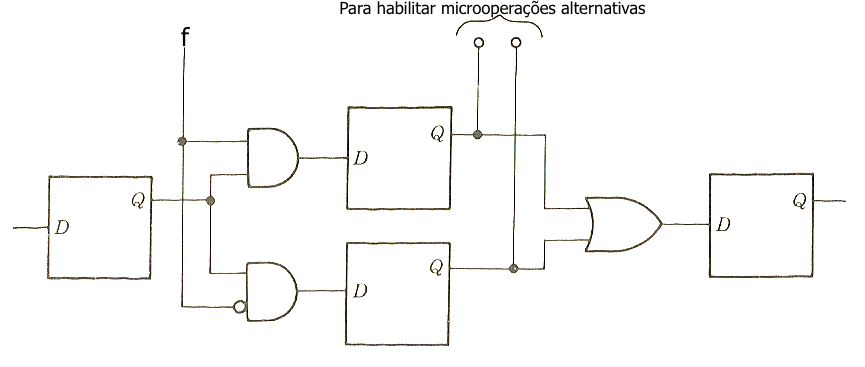
|
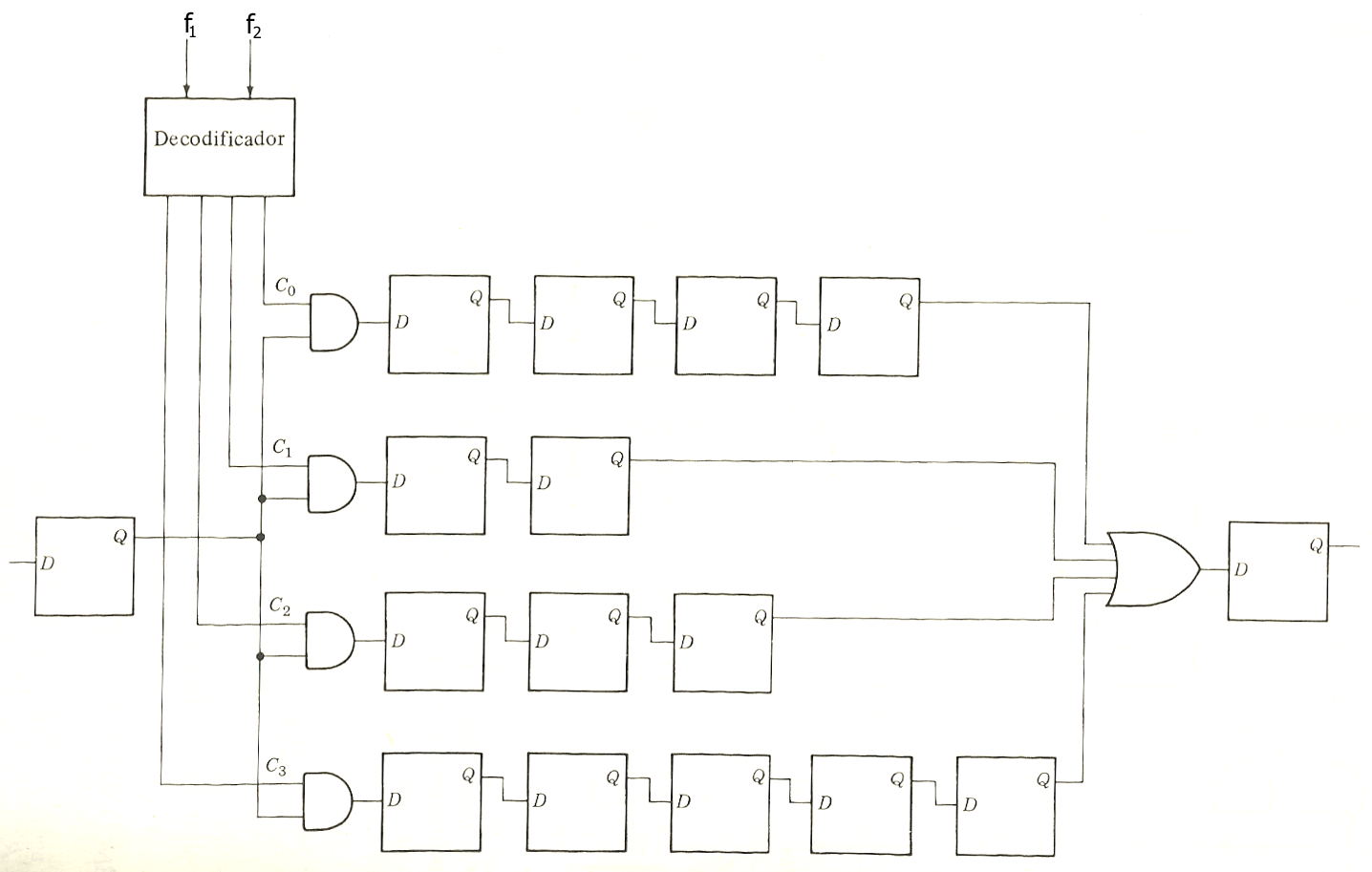
Pode haver mais de dois caminhos possíveis para o controlador e os caminhos alternativos terem diferentes comprimentos, com a escolha sendo determinada por variáveis de realimentação.
|
Uma e somente uma das linhas C0, C1, C2, e C3 está em nível lógico 1 e somente o caminho de seqüência correspondente está selecionado e as microoperações serão executadas.
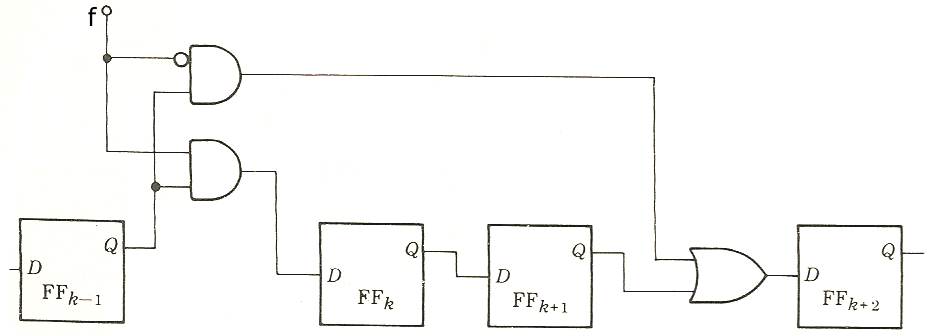
Salto de Estados
|
Se f=1: seqüência avança de k-1, k, k+1 e k+2
Se f=0 : seqüência avança de k-1, k+2(salta os estados k e k+1)
Inibição de Estados
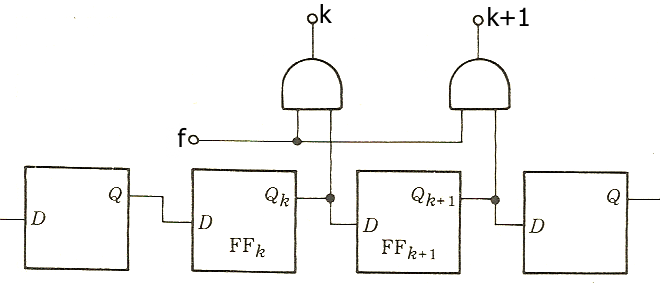 |
Se f=1 : estados k e k+1 são executados
Se f=0 : estados k e k+1 são inibidos ou ficam inativos; as microoperações não são executadas
O número de microoperações ou estados saltados é inteiramente ajustável.
Repetição de Estados
|
Se f=1: seqüência normal do controlador
Se f=0 : a seqüência repete os estados k, k+1 e k+2 enquanto f=0 e retornará para a seqüência normal quando f=1.
Seqüência para Subtração
Para realizar a subtração de dois números nos registradores é bastante adicionar o negativo de um número ao outro.Caso o número negativo seja representado por complemento-de-dois o controlador precisa ser modificado para realizar duas microoperações adicionais: complementar e incrementar.Estas microoperações exigem dois estados adicionais.Agora, o controlador terá nove estados.
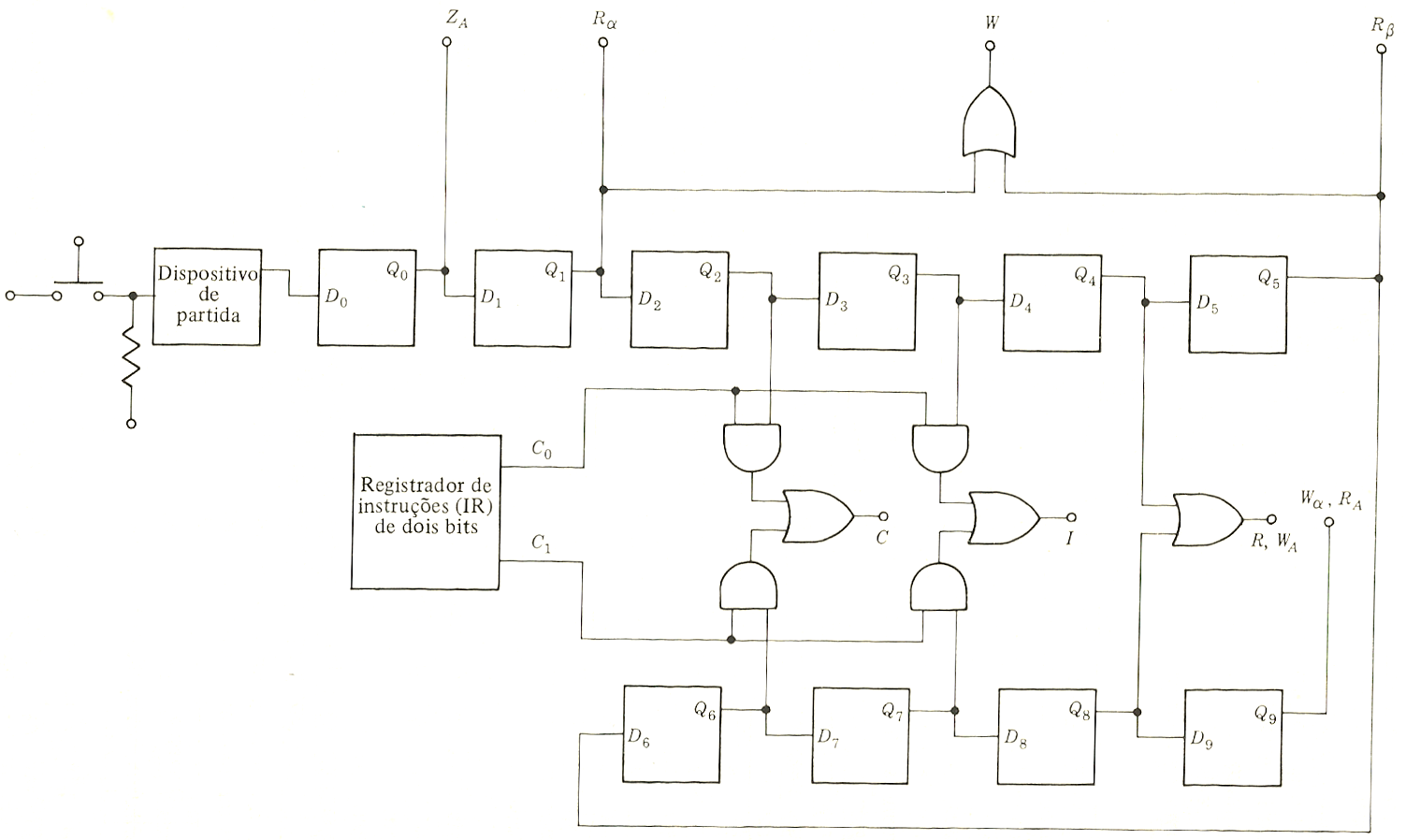
Caso seja necessário um controlador para executar quaisquer das quatro operações possíveis entre os conteúdos dos registradores, então um controlador que realizasse a operação desejada em resposta a uma instrução dada ao controlador é mais prático.Um controlador com essas características está mostrado na figura abaixo.
|
A Instrução C0C1 determina a microoperação a ser realizada pelo controlador e o Registrador de Instrução(IR) armazena a instrução a ser executada.
|
Código 00 : desabilita as portas AND (C=I=0), então realiza a soma
Código 01 : desabilita as portas AND inferiores e habilita as superiores Código 10 : desabilita as portas AND superiores e habilita as inferiores Código 11 : habilita todas as portas AND |

Atualizada em

